
Tilaa sosiaalinen mediamme saadaksesi pikaviestejä
Uraauurtavien teknologisten edistysaskeleiden aikakaudella navigointijärjestelmät nousivat perustavanlaatuisiksi tukipylväiksi, jotka ajoivat lukuisia edistysaskeleita erityisesti tarkkuuskriittisillä aloilla.Matka alkeellisesta taivaallisesta navigoinnista kehittyneisiin inertialavigointijärjestelmiin (INS) kuvastaa ihmiskunnan peräänantamatonta tutkimusta ja tarkkuutta.Tämä analyysi sukeltaa syvälle INS:n monimutkaiseen mekaniikkaan, tutkien kuituoptisten gyroskooppien (FOG) huipputeknologiaa ja polarisaation keskeistä roolia kuitosilmukoiden ylläpidossa.
Osa 1: Inertianavigointijärjestelmien (INS) salaus:
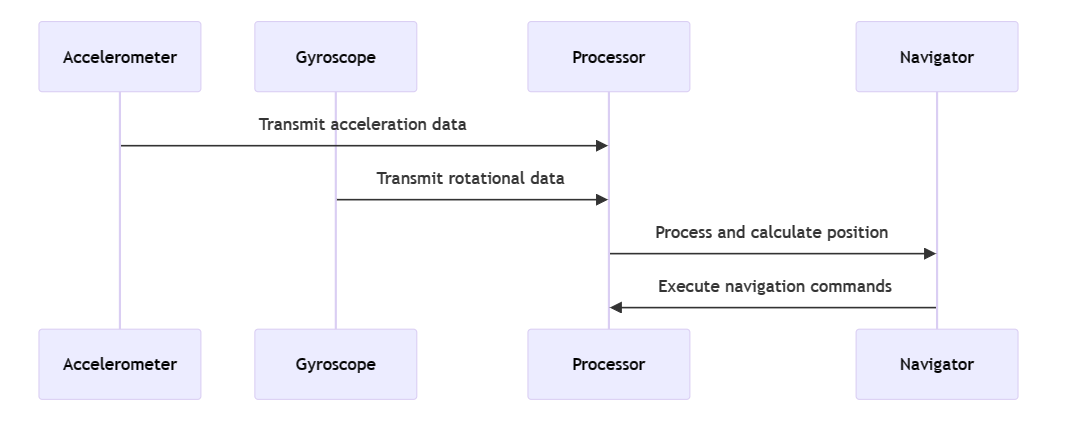
Inertiaaliset navigointijärjestelmät (INS) erottuvat itsenäisistä navigoinnin apuvälineistä, jotka laskevat tarkasti ajoneuvon sijainnin, suunnan ja nopeuden ulkoisista vihjeistä riippumatta.Nämä järjestelmät harmonisoivat liike- ja pyörimisanturit ja integroituvat saumattomasti alkunopeuden, sijainnin ja suunnan laskennallisiin malleihin.
Arkkityyppinen INS käsittää kolme pääkomponenttia:
· Kiihtyvyysmittarit: Nämä tärkeät elementit rekisteröivät ajoneuvon lineaarisen kiihtyvyyden ja muuttavat liikkeen mitattavissa oleviksi tiedoiksi.
· Gyroskoopit: Integroitu kulmanopeuden määrittämiseen, nämä komponentit ovat keskeisiä järjestelmän suuntaamisessa.
· Tietokonemoduuli: INS:n hermokeskus, joka käsittelee monitahoisia tietoja tuottaakseen reaaliaikaista sijaintianalytiikkaa.
INS:n vastustuskyky ulkoisille häiriöille tekee siitä välttämättömän puolustussektorilla.Se kuitenkin kamppailee "driftin" kanssa - tarkkuuden asteittaisen heikkenemisen kanssa, mikä vaatii kehittyneitä ratkaisuja, kuten anturifuusiota virheiden lieventämiseksi (Chatfield, 1997).
Osa 2. Kuituoptisen gyroskoopin toimintadynamiikka:
Kuituoptiset gyroskoopit (FOG) ennustavat muuttuvaa aikakautta pyörimistunnistuksessa hyödyntäen valon häiriöitä.Tarkkuuden ytimessä FOG:t ovat elintärkeitä ilmailuajoneuvojen vakauttamisessa ja navigoinnissa.
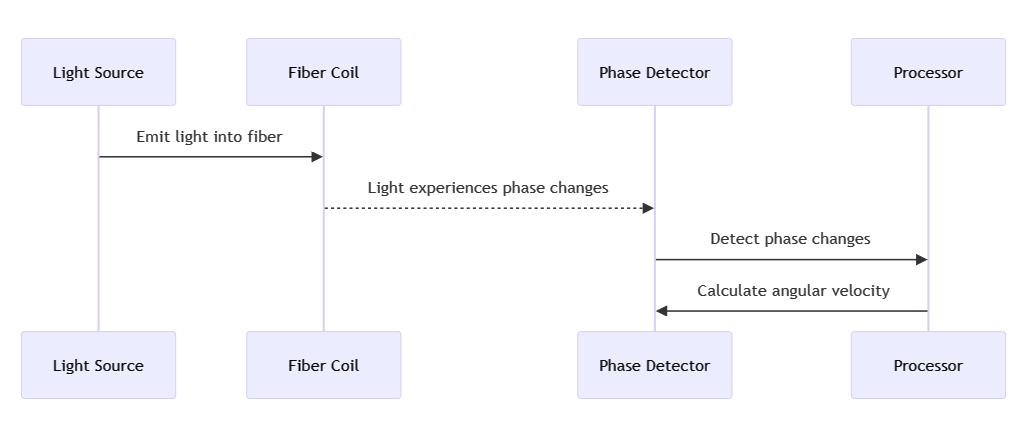
FOG:t toimivat Sagnac-ilmiöllä, jossa pyörivän kuitukelan sisällä vastakkaisiin suuntiin kulkeva valo ilmaisee pyörimisnopeuden muutosten kanssa korreloivaa vaihesiirtoa.Tämä vivahteikas mekanismi muuntaa tarkkoja kulmanopeusmittareita.
Olennaisia komponentteja ovat:
· Valonlähde: Alkupiste, tyypillisesti laser, joka aloittaa koherentin valon matkan.
· Kuitukela: Kierretty optinen putki, pidentää valon liikerataa ja vahvistaa siten Sagnac-efektiä.
· Valonilmaisin: Tämä komponentti havaitsee valon monimutkaiset häiriökuviot.
Osa 3: Polarisoinnin merkitys kuitusilmukoiden ylläpitämisessä:
Polarisaatiota ylläpitävät (PM) kuitusilmukat, jotka ovat olennaisia FOG:ille, varmistavat valon tasaisen polarisaatiotilan, mikä on keskeinen tekijä häiriökuvion tarkkuudessa.Nämä erikoistuneet kuidut, jotka taistelevat polarisaatiomuodon hajoamista vastaan, vahvistavat FOG-herkkyyttä ja tietojen aitoutta (Kersey, 1996).
PM-kuitujen valinta, jonka määräävät toiminnalliset tarpeet, fyysiset ominaisuudet ja systeeminen harmonia, vaikuttaa yleisiin suorituskykymittareihin.
Osa 4: Hakemukset ja empiiriset todisteet:
FOG:t ja INS löytävät resonanssia erilaisissa sovelluksissa, aina miehittämättömien ilmareissujen ohjaamisesta elokuvallisen vakauden varmistamiseen ympäristön arvaamattomuuden keskellä.Todistus niiden luotettavuudesta on niiden käyttö NASAn Mars Roversissa, mikä helpottaa vikaturvallista maan ulkopuolista navigointia (Maimone, Cheng ja Matthies, 2007).
Markkinaradat ennustavat näille teknologioille kasvavaa markkinarakoa, ja tutkimusvektorit tähtäävät järjestelmän kestävyyden, tarkkuusmatriisien ja sopeutumisspektrien vahvistamiseen (MarketsandMarkets, 2020).

Rengas lasergyroskooppi
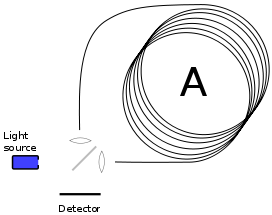
Kaavio kuituoptisesta gyroskoopista, joka perustuu sagnac-efektiin
Viitteet:
- Chatfield, AB, 1997.Korkean tarkkuuden inertianavigoinnin perusteet.Progress in Astronautics and Aeronautics, Voi.174. Reston, VA: American Institute of Aeronautics and Astronautics.
- Kersey, AD, et ai., 1996. "Fiber Optic Gyros: 20 Years of Technology Advancement", julkaisussaIEEE:n julkaisut,84(12), s. 1830-1834.
- Maimone, MW, Cheng, Y. ja Matthies, L., 2007. "Visual odometry on the Mars Exploration Rovers - A Tool to Ensure Accurate Driving and Science Imaging"IEEE Robotics & Automation Magazine,14(2), s. 54-62.
- MarketsandMarkets, 2020. "Inertiaalisen navigointijärjestelmän markkinat luokan, tekniikan, sovelluksen, komponentin ja alueen mukaan - Globaali ennuste vuoteen 2025."
Vastuuvapauslauseke:
- Vakuutamme täten, että tietyt verkkosivuillamme näkyvät kuvat on kerätty Internetistä ja Wikipediasta koulutusta ja tiedon jakamista varten.Kunnioitamme kaikkien alkuperäisten tekijöiden immateriaalioikeuksia.Näitä kuvia käytetään ilman kaupallista hyötyä.
- Jos uskot, että jokin käytetty sisältö loukkaa tekijänoikeuksiasi, ota meihin yhteyttä.Olemme enemmän kuin valmiita ryhtymään asianmukaisiin toimenpiteisiin, mukaan lukien kuvien poistaminen tai asianmukaisten tietojen antaminen varmistaaksemme immateriaalioikeuksia koskevien lakien ja määräysten noudattamisen.Tavoitteemme on ylläpitää alustaa, joka on sisällöltään rikas, oikeudenmukainen ja kunnioittaa muiden immateriaalioikeuksia.
- Ota meihin yhteyttä alla olevalla yhteydenottotavalla,email: sales@lumispot.cn.Sitoudumme ryhtymään välittömästi toimiin ilmoituksen saatuamme ja varmistamaan 100 % yhteistyön tällaisten ongelmien ratkaisemisessa.
Postitusaika: 18.10.2023