Tilaa sosiaalisen median kanavamme saadaksesi nopeita julkaisuja
Uraauurtavien teknologisten edistysaskeleiden aikakaudella navigointijärjestelmät nousivat esiin peruspilareina, jotka vauhdittivat lukuisia edistysaskeleita, erityisesti tarkkuuskriittisillä aloilla. Matka alkeellisesta taivaannavigointijärjestelmästä hienostuneisiin inertianavigointijärjestelmiin (INS) on osoitus ihmiskunnan tinkimättömästä pyrkimyksestä tutkimusmatkoihin ja äärimmäisen tarkkaan löytöyn. Tämä analyysi syventyy INS:n monimutkaiseen mekaniikkaan, tutkien kuituoptisten gyroskooppien (FOG) huipputeknologiaa ja polarisaation keskeistä roolia kuitusilmukoiden ylläpidossa.
Osa 1: Inertianavigointijärjestelmien (INS) tulkinta:
Inertianavigointijärjestelmät (INS) erottuvat itsenäisinä navigointiapuvälineinä, jotka laskevat tarkasti ajoneuvon sijainnin, suunnan ja nopeuden ulkoisista vihjeistä riippumatta. Nämä järjestelmät harmonisoivat liike- ja pyörimisanturit ja integroituvat saumattomasti laskennallisiin malleihin alkunopeuden, sijainnin ja suunnan määrittämiseksi.
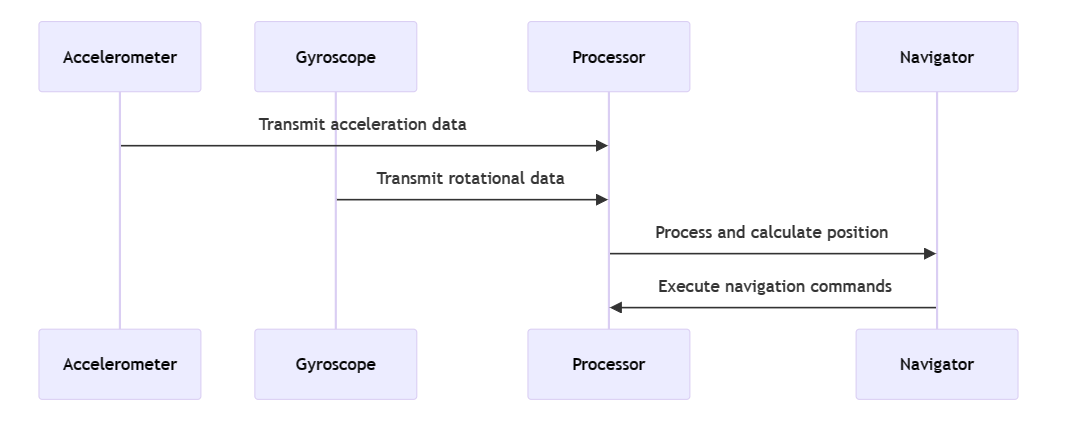
Arkkityyppinen INS käsittää kolme keskeistä osaa:
· Kiihtyvyysanturit: Nämä ratkaisevat elementit rekisteröivät ajoneuvon lineaarisen kiihtyvyyden ja muuntavat liikkeen mitattavaksi tiedoksi.
· Gyroskoopit: Nämä komponentit ovat olennaisia kulmanopeuden määrittämisessä ja keskeisiä järjestelmän suunnan määrittämisessä.
· Tietokonemoduuli: INS:n hermokeskus, joka käsittelee monipuolista dataa reaaliaikaisen sijaintianalyysin tuottamiseksi.
INS:n immuniteetti ulkoisille häiriöille tekee siitä korvaamattoman puolustusaloilla. Se kuitenkin kamppailee "ajautumisen" eli asteittaisen tarkkuuden heikkenemisen kanssa, mikä edellyttää kehittyneitä ratkaisuja, kuten anturifuusiota virheiden lieventämiseksi (Chatfield, 1997).
Osa 2. Kuituoptisen gyroskoopin toimintadynamiikka:
Kuituoptiset gyroskoopit (FOG) aloittavat mullistavan aikakauden pyörimisanturien käytössä hyödyntäen valon interferenssiä. Tarkkuutensa ansiosta FOG-laitteet ovat elintärkeitä ilmailu- ja avaruusalusten vakauttamiselle ja navigoinnille.
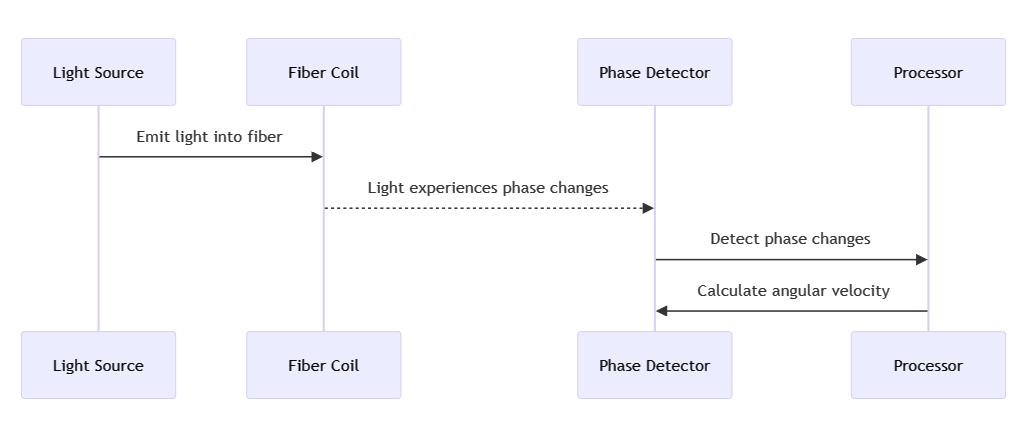
FOG-teknologia toimii Sagnac-ilmiön pohjalta, jossa pyörivän kuitukierteen sisällä vastakkaisiin suuntiin kulkeva valo aiheuttaa vaihesiirron, joka korreloi pyörimisnopeuden muutosten kanssa. Tämä vivahteikas mekanismi muuntuu tarkkoiksi kulmanopeuden mittareiksi.
Olennaisia komponentteja ovat:
· Valonlähde: Koherenttisen valon matkan aloittava lähtöpiste, tyypillisesti laser.
· KuitukäämiKäämitetty optinen putki pidentää valon lentorataa ja vahvistaa siten Sagnac-ilmiötä.
· Valoilmaisin: Tämä komponentti havaitsee valon monimutkaiset interferenssikuviot.
Osa 3: Polarisaation merkitys kuitusilmukoiden ylläpitämisessä:
Polarisaatiota ylläpitävät (PM) kuitusilmukat, jotka ovat olennaisia FOG-materiaaleille, varmistavat valon tasaisen polarisaatiotilan, joka on keskeinen tekijä interferenssikuvion tarkkuudessa. Nämä erikoiskuidut, jotka estävät polarisaatiomoodihajontaa, parantavat FOG-materiaalien herkkyyttä ja datan aitoutta (Kersey, 1996).
PM-kuitujen valinta, jonka sanelevat operatiiviset vaatimukset, fyysiset ominaisuudet ja systeeminen harmonia, vaikuttaa yleisiin suorituskykymittareihin.
Osa 4: Sovellukset ja empiirinen näyttö:
FOG- ja INS-raketit löytävät resonanssia monissa eri sovelluksissa miehittämättömien ilmalentojen järjestämisestä elokuvamaisen vakauden varmistamiseen ympäristön arvaamattomuuden keskellä. Osoituksena niiden luotettavuudesta on niiden käyttö NASAn Mars-mönkijöissä, jotka mahdollistavat vikasietoisen maan ulkopuolisen navigoinnin (Maimone, Cheng ja Matthies, 2007).
Markkinakehitys ennustaa näiden teknologioiden kasvavaa markkinarakoa, ja tutkimusvektorit pyrkivät vahvistamaan järjestelmän joustavuutta, tarkkuusmatriiseja ja sopeutumiskykyspektrejä (MarketsandMarkets, 2020).

Rengaslasergyroskooppi
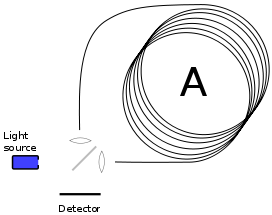
Kaaviokuva kuituoptisesta gyroskoopista, joka perustuu sagnac-ilmiöön
Viitteet:
- Chatfield, Alberta, 1997.Tarkan inertianavigoinnin perusteet.Astronautics and Aeronautics -tutkimus, osa 174. Reston, VA: Amerikan ilmailu- ja astronautiikkainstituutti.
- Kersey, AD, et al., 1996. "Kuituoptiset gyroskoopit: 20 vuotta teknologian kehitystä", julkaisussaIEEE:n julkaisut,84(12), sivut 1830–1834.
- Maimone, MW, Cheng, Y. ja Matthies, L., 2007. "Mars-mönkijöiden visuaalinen matkanmittaus - työkalu tarkan ajo- ja tieteellisen kuvantamisen varmistamiseksi"IEEE Robotics & Automation -lehti,14(2), sivut 54–62.
- MarketsandMarkets, 2020. "Inertianavigointijärjestelmien markkinat luokittain, teknologian, sovelluksen, komponentin ja alueen mukaan - maailmanlaajuinen ennuste vuoteen 2025 asti."
Vastuuvapauslauseke:
- Ilmoitamme täten, että tietyt verkkosivustollamme näkyvät kuvat on kerätty internetistä ja Wikipediasta koulutuksen edistämiseksi ja tiedon jakamiseksi. Kunnioitamme kaikkien alkuperäisten tekijöiden immateriaalioikeuksia. Näitä kuvia käytetään ilman kaupallista tarkoitusta.
- Jos uskot, että jokin käytetty sisältö loukkaa tekijänoikeuksiasi, ota meihin yhteyttä. Olemme enemmän kuin valmiita ryhtymään asianmukaisiin toimenpiteisiin, mukaan lukien kuvien poistaminen tai asianmukaisen lähteen ilmoittaminen, varmistaaksemme immateriaalioikeuslakien ja -määräysten noudattamisen. Tavoitteenamme on ylläpitää alustaa, joka on sisällöltään rikas, oikeudenmukainen ja kunnioittaa muiden immateriaalioikeuksia.
- Ota meihin yhteyttä seuraavalla yhteydenottotavalla,email: sales@lumispot.cnSitoudumme ryhtymään välittömästi toimiin saatuamme minkä tahansa ilmoituksen ja varmistamme 100-prosenttisen yhteistyön tällaisten ongelmien ratkaisemiseksi.
Julkaisun aika: 18.10.2023